Testing¶
To ensure high code quility each module is tested extensively by many test suites. The test suites are executed both on native Linux and on many of the supported boards. See Test suites for a list of all test suites that are executed before each release.
The native Linux test suites are executed automatically on each commit.
Test result: https://travis-ci.org/eerimoq/simba
Code coverage: https://codecov.io/gh/eerimoq/simba
Hardware setup¶
Below is a picture of all supported boards connected to a USB hub. The USB hub is connected to a linux PC (not in the picture) that executes test suites on all boards.
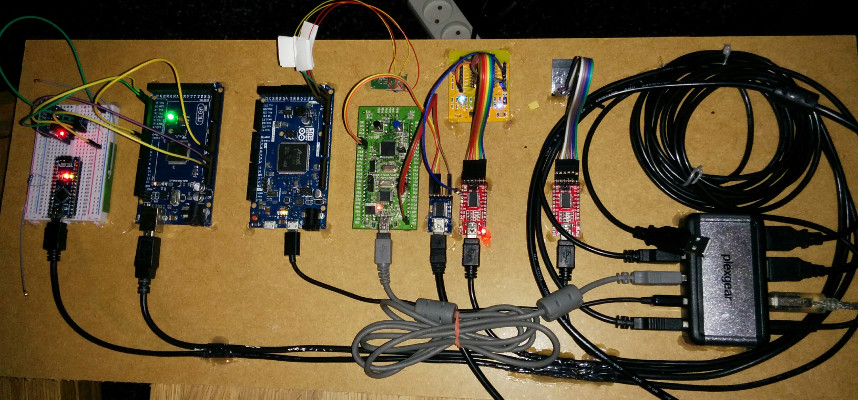
The boards are (from left to right): Arduino Nano, Arduino Mega, Arduino Due, STM32VLDISCOVERY, ESP-12E Development Board and ESP-01
A short description of the setup:
- The DS3231 device (on the breadboard to the left) is connected over i2c to the Arduino Mega.
- CAN0 is connected to CAN1 on the Arduino Due. The CAN driver is tested by sending frames between the two CAN devices.
- The UART of the STM32VLDISCOVERY board is connected to a serial to USB adaptor. DTR on the adaptor is used to reset the board.
- The ESP-12E Development Board also has a serial to USB adaptor connected. RTS is used to set the board in flashing mode (GPIO0) and DTR is used to reset the board (REST).
Test suites¶
Below is a list of all test suites that are executed before every release. They are listed per board.
Arduino Due¶
- kernel/sys
- kernel/thrd
- kernel/time
- kernel/timer
- sync/bus
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- alloc/heap
- text/configfile
- text/std
- text/re
- debug/log
- oam/settings
- oam/shell
- filesystems/fs
- filesystems/spiffs
- encode/base64
- encode/json
- hash/crc
- hash/sha1
- inet/http_server
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/mqtt_client
- inet/ping
- drivers/chipid
- drivers/can
- drivers/flash
- drivers/pin
Arduino Mega¶
- kernel/sys
- kernel/thrd
- kernel/time
- kernel/timer
- sync/bus
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- alloc/heap
- text/configfile
- text/std
- text/re
- debug/log
- oam/settings
- oam/shell
- filesystems/fat16
- filesystems/fs
- encode/base64
- hash/crc
- hash/sha1
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/mqtt_client
- inet/ping
- drivers/adc
- drivers/analog_input_pin
- drivers/ds3231
- drivers/sd
- drivers/pin
Arduino Nano¶
Arduino Pro Micro¶
Arduino Uno¶
Cygwin¶
ESP-01¶
ESP-12E Development Board¶
- kernel/sys
- kernel/thrd
- kernel/timer
- sync/bus
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- text/std
- text/re
- debug/log
- oam/shell
- encode/base64
- encode/json
- hash/crc
- hash/sha1
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/mqtt_client
- inet/network_interface/wifi_esp
- inet/ping
- drivers/pin
- filesystems/fs
- filesystems/spiffs
Linux¶
- kernel/sys
- kernel/thrd
- kernel/time
- kernel/timer
- sync/bus
- sync/chan
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- alloc/heap
- text/configfile
- text/std
- text/re
- debug/log
- oam/service
- oam/settings
- oam/shell
- filesystems/fat16
- filesystems/fs
- filesystems/spiffs
- encode/base64
- encode/json
- hash/crc
- hash/sha1
- inet/http_server
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/mqtt_client
- inet/ping
- multimedia/midi
Nano32¶
- kernel/sys
- kernel/thrd
- kernel/timer
- sync/bus
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- text/std
- text/re
- debug/log
- oam/shell
- encode/base64
- encode/json
- hash/crc
- hash/sha1
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/network_interface/wifi_esp
- inet/ping
- filesystems/fs
- filesystems/spiffs
NodeMCU¶
Particle IO Photon¶
- kernel/sys
- kernel/thrd
- kernel/time
- kernel/timer
- sync/bus
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- text/std
- text/re
- debug/log
- oam/shell
- encode/base64
- encode/json
- hash/crc
- hash/sha1
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/mqtt_client
- inet/ping
STM32F3DISCOVERY¶
STM32VLDISCOVERY¶
- kernel/sys
- kernel/thrd
- kernel/timer
- sync/bus
- sync/event
- sync/queue
- sync/rwlock
- sync/sem
- collections/binary_tree
- collections/bits
- collections/fifo
- collections/hash_map
- alloc/circular_heap
- text/std
- text/re
- debug/log
- oam/shell
- encode/base64
- encode/json
- hash/crc
- hash/sha1
- inet/http_websocket_client
- inet/http_websocket_server
- inet/inet
- inet/mqtt_client
- inet/ping
- drivers/pin