Socket devices¶
The Linux socket device drivers implementation allows an external program to simulate the hardware. The external program communicates with the Simba application using TCP sockets, one socket for each device.
The Python script socket_device.py can be used to monitor and send data to a device.
Arduino Mega example¶
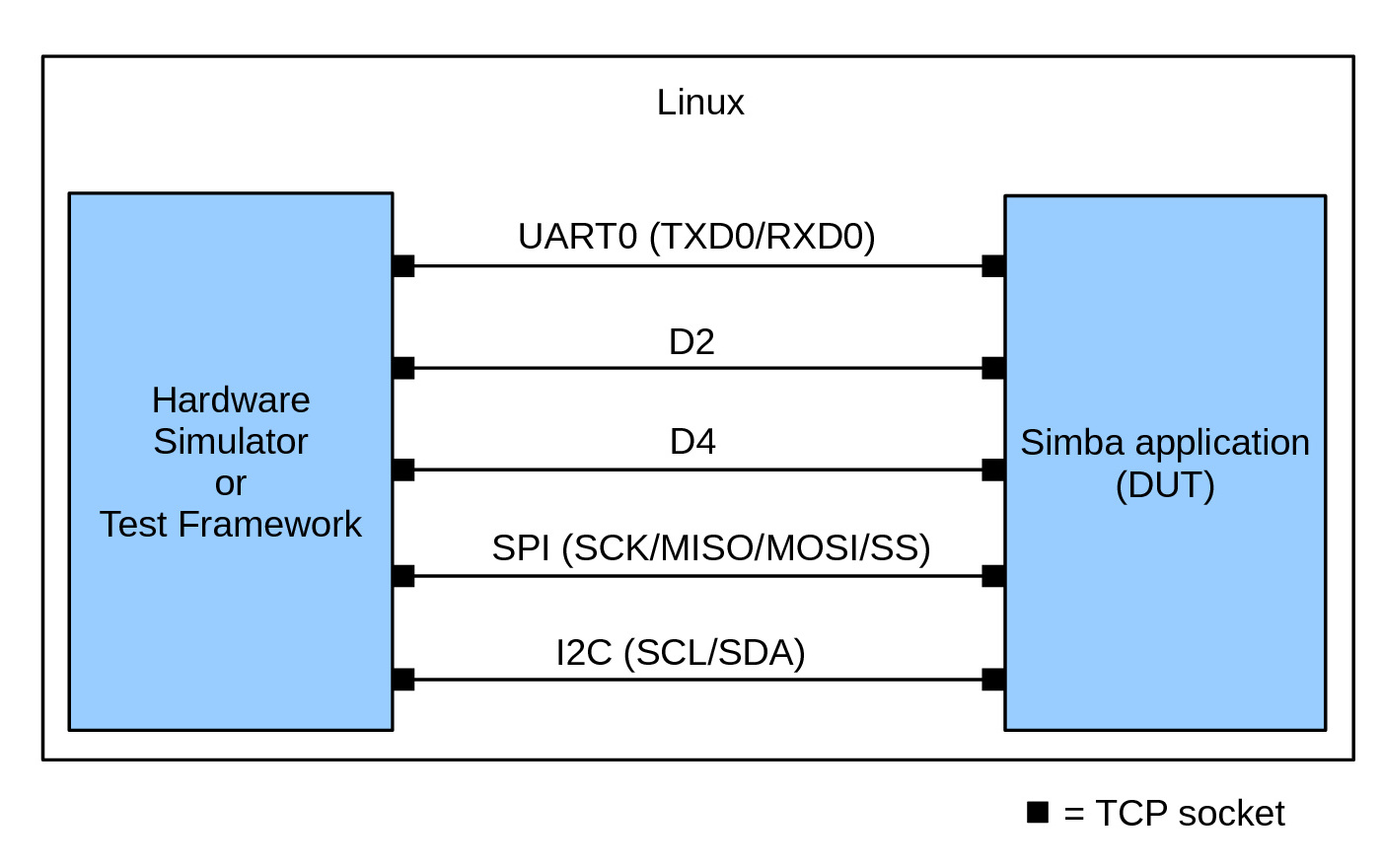
In this example socket_device.py is the hardware simulator (to the left in the image below), and socket_device is the Simba application (to the right in the image below). The five horizontal lines each represents input and output of one device.
First build and run the linux application with the Arduino Mega pinout...
$ make BOARD=linux PINOUT=arduino_mega run
...and then, in a second terminal, monitor digital pin 2, d2.
> socket_device.py pin d2
Connecting to localhost:47000... done.
Requesting pin device d2... done.
$
14:48:10.004512 pin(d2) RX: high
14:48:52.535323 pin(d2) RX: high
14:49:20.123124 pin(d2) RX: low
Alternatively, monitor all devices at the same time with the monitor make target.
$ make BOARD=linux PINOUT=arduino_mega monitor
socket_device.py monitor
Connecting to localhost:47000... done.
Requesting uart device 0... done.
...
Connecting to localhost:47000... done.
Requesting pin device 2... done.
Connecting to localhost:47000... done.
Requesting pin device 4... done.
...
$
14:51:50.531761 pin(2) RX: low
14:51:50.541784 uart(0) RX: b'\n'
14:51:51.178744 pin(4) RX: high
Python modules¶
There are two Python modules in the folder bin/socket_device in the Simba repository. Both modules implements the same interface as the default Python module/package with the same name, and can be used to communicate over a socket device instead of using the hardware.
- serial.py implements the pyserial interface.
- can.py implements the python-can interface.
Use the environment variable PYTHONPATH to import the socket
device modules instead of the default modules/packages.
> export PYTHONPATH=$(readlink -f ${SIMBA_ROOT}/bin)
> export PYTHONPATH=${PYTHONPATH}:$(readlink -f ${SIMBA_ROOT}/bin/socket_device)
> bpython3
>>> import serial
>>> serial
<module 'serial' from '/home/erik/workspace/simba/bin/socket_device/serial.py'>
>>> import can
>>> can
<module 'can' from '/home/erik/workspace/simba/bin/socket_device/can.py'>
>>>
Protocol¶
At startup the Simba application creates a socket and starts listening for clients on TCP port 47000.
Devices¶
These drivers supports the socket device protocol at the moment. More to be added when needed.
Uart¶
The UART socket is equivalent to a serial port, it streams data to and from the application.
Pin¶
Sends high or low when written to given device. Input is not
supported yet.
Pwm¶
Sends frequency=<value> and duty_cycle=<value> when set on
given device.
Can¶
Sends and receives frames on the format
id=<id>,extended=<extended>,size=<size>,data=<data>. <id> and
<data> are hexadecimal numbers not prefixed with 0x. size
and <extended> is a decimal integers.
> socket_device.py can 0
Connecting to localhost:47000... done.
Requesting can device 0... done.
$ id=00000005,extended=1,size=2,data=0011<Enter>
14:57:22.344321 can(0) TX: id=00000005,extended=1,size=2,data=0011
14:57:22.346321 can(0) RX: id=00000006,extended=1,size=2,data=0112
I2c¶
Sends and receives data on the format
address=<address>,size=<size>,data=<data>. <address> is an
decimal integer, while <size> and <data> is a hexadecimal
numbers.
> socket_device.py i2c 0
Connecting to localhost:47000... done.
Requesting i2c device 0... done.
$
14:57:22.346321 i2c(0) RX: address=0006,size=0003,data=1a2b3c
Device request message¶
This message is sent to the Simba application to request a device.
+---------+---------+----------------+
| 4b type | 4b size | <size>b device |
+---------+---------+----------------+
`device` is the device name as a string without NULL termination.
TYPE SIZE DESCRIPTION
--------------------------------------
1 n Uart device request.
3 n Pin device request.
5 n Pwm device request.
7 n Can device request.
9 n I2c device request.
11 n Spi device request.
Device response message¶
This message is the response to the request message.
+---------+---------+-----------+
| 4b type | 4b size | 4b result |
+---------+---------+-----------+
`result` is zero(0) on success, and otherwise a negative error
code.
Defined error codes are:
ENODEV(19): No device found matching requested device name.
EADDRINUSE(98): The requested device is already requested and in
use.
TYPE SIZE DESCRIPTION
--------------------------------------
2 4 Uart device response.
4 4 Pin device response.
6 4 Pwm device response.
8 4 Can device response.
10 4 I2c device response.
12 4 Spi device response.